Knowledge theory has given up the assumption of “privileged concepts” that function as axiomatic foundations to control the logical value of other concepts or propositions. Similarly, you must give up the assumption that there are privileged places, notes of special and knowledge-ensuring quality.
Luhmann cites Richard Rorty's Philosophy and the Mirror of Nature as an example of philosophers abandoning "priviliged concepts". What does this even mean?
Rorty on "Priviliged Concepts"
If we peruse Rorty's book, we find he is attacking Plato's analysis of knowledge as "true, justified belief".
What does Plato mean by this? Well, suppose I have a coin which has one side say "yes" and the other side say "no". I ask a question, flip this coin, and it will always answer truthfully.
Do I gain knowledge by using my magic coin? Plato says no, because the process is entirely unjustifiable. Rorty attacks Plato's idea of justification as ambiguous and vague (and Rorty does make a few good points).
Why does it matter? Well, Neoplatonists believed we could figure out some set of axioms, and then deduce everything in the world. If only we could determine those axioms! But these axioms would have some privilged position, from which all truth flowed. This is, more or less, what Aristotle argued in his Metaphysics book Gamma, Posterior Analytics on the problem of regression, etc.
Rorty takes a nuanced position, which I'm not sure I fully appreciate. I think Rorty argues that we develop some ersatz "first principles" which are tentative (in the sense that we may revise them, under appropriate circumstances). But they are not divine, they are not immutable, they are not universal, they are not innate knowledge. Instead, these "principles" are built out of experience and learning. As we educate ourselves, they become reinforcing or else we amend them.
Analogy with "Position"
Some people have interpreted Luhmann as saying that organizing your Zettels into clusters is bad, and you should just sequentially number them based on position "at the time of incorporation". This fails to appreciate Luhmann's analogy with "privilged concepts" in the analysis of knowledge.
Scott Scheper suggests using a "skeleton" zettelkasten to get started, with some pre-determined slips based off of Wikipedia's outline of knowledge (or some other analogous source). It's curious, because — as Jillian M. Hess observes in her book How Romantics and Victorians Organized Knowledge, page 24 — Melville Dewey began his catalogue system as a remedy to the commonplace method's ambiguity. In other words, Scheper reinvents Dewey's method. This is precisely what Luhmann warns against in his (already cited) essay:
The result of working with this technique for a long time is a kind of second memory, an alter ego with which you can always communicate. It has, similar to our own memory, no pre-planned comprehensive order, no hierarchy, and surely no linear structure like a book. And by that very fact, it is alive independently of its author. The entire note collection can only be described as a mess, but at least it is a mess with a non-arbitrary internal structure.
[Emphasis mine]
Christian Tietze argues the opposite extreme, namely that any use of categories is bad. Instead we should use tags.
When I read 17th and 18th century European philosophy, everyone disagrees with each other because they use the same technical terms but attribute different definitions to them. I mention this because I feel in a similar situation when discussing "tags" versus "categories", and this makes me hesitate to criticize Christian too much — it feels quite likely we are using different terminology for the same concepts.
I think the crucial difference between "tags" and "categories" is that one item may have zero or more tags, but at most one category. In a filing cabinet, I file a piece of paper in exactly one folder, and the analogy would be with one item in a category.
Here I confess I never found tags useful on blogs, and it is even less useful on paper Zettelkasten. I suspect strongly that "register slips" and "the index" are the analogous quantities to "tags", and everyone agrees these are "killer features" to paper Zettelkasten.
I have been using Emacs...for a while now. I've found it useful to automate away common tasks using Lisp functions. One that has been recurring: write the creation date. Using something like datetime2 package in LaTeX (and assuming you're using PDFlatex), then the following command can be used to automatically determine the date and time you started writing:
The other bit of advice I have is to use Yasnippets. It's so much easier to start a new line, enter "d", hit tab, and have it expand to a definition environment (or have "thm" expand to a theorem environment). I have written a few snippets and found them wonderful.
I was asked about the details concerning my Zettelkasten (last time I checked, I had an estimated 7920 slips in it, which motivated the question). I thought I would write them down here with some examples.
The basic workflow boils down to:
Pick some reading material
Read it
Summarize the reading material in "literature notes"
Write some "permanent notes"
Integrate the "permanent notes" in my "zoo" [Zettelkasten]
Think about stuff
Write a manuscript using my permanent notes
Questions tend to crop up while writing a manuscript, which guides my choice of next reading material
Literature Notes
Definition.
A Literature Note is some writing which occurs when reading an article or book. Its contents vary considerably, but are used to create permanent notes. The literature notes are stored in a separate "shoe box".
The content of the literatuer notes varies depending on how familiar I am with the subject, or whether I can "see where it's going". These are written on quarter-slips of printer paper which are 4.25-inches wide and 5.5-inches tall. I also draw a stripe down the "top" using a blue highlighter, so I can see if I accidentally placed one in my Zettelkasten. [I store literature notes in a "bibliography shoe box".]
Figure 1. A [clipped] literature note from Mac Lane's Categories for the Working Mathematician.
If I'm having difficulty with some portion of an article or book, I sometimes look for other explanations, and insert "citations" to them. (Basically, a sentence like, "I honestly cannot follow [author] here, but I found [other reference] useful, specifically [section].")
Note I usually write small, and this is kinda large for my writing: it's about 3/16 inches, or 0.5 centimeters, for a line's height. I do not place lined paper behind the slip as I write, so it can get pretty curvy by accident.
The back of the literature notes include bibliographic information, and when I read it. This may include a "counter" for long chapters, which is just something like "(part 3 of N)". For technical articles, I also include the journal information. The idea is, if I completely lose access to my computer and papers, I can look up the source material again. Consequently, I give as much bibliographic information as possible.
Figure 2. The back of the literature note from figure 1.
I can refer to my literature notes when writing a permanent note, but I do not permit myself to refer to the original source when writing permanent notes. If I find I need to refer to the original source, I take that to mean my literature note-taking process was lacking somehow.
There are times when, for example, I read a source particularly from one perspective. (E.g., "How can this article about quantum hydrodynamics be used in this particular calculation I'm trying to do?") Later on, I realize there was some important aspect I neglected to take notes on (e.g., "Oh, that article about quantum hydrodynamics revived the 'particle model tradition' of Stokes, I totally missed that."). In that case, I re-read the article or book, and because I note when I read it on the back...it acts like a note to "future me" that there was some material I missed in the reading.
(And, for the record, I organize the literature notes by author-year-title.)
Permanent Notes
Definition.
A Permanent Note is some writing which is given an ID number, a "title", and some content; it is stored in the Zettelkasten.
Most of my notes are mathematical in nature, or written in a "mathematical style". I mean to say, I write them using "mathematical registers" to classify the sort of statement (theorem, example, definition, remark, etc.) and a summary of the result. Then the body of the slip of paper contains more precise details.
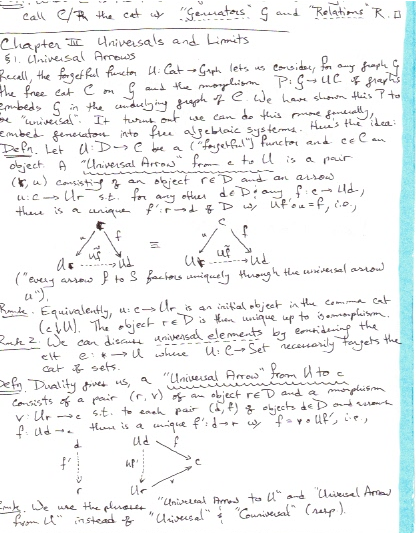
Figure 3. An example of a permanent note [front side].
I write on printer paper cut into quarters, so this is 5.5-inches wide and 4.25 inches tall. When writing on the paper, I have a college-ruled lined paper behind the quarter slip (which is why it appears so straight and clean).
ID Numbering. I should mention the ID number (the "6.1.2/3b" in the upper left-hand corner) has the following BNF grammar:
The "folder part" encodes the generic subject of the slip. For example, "6.1.2" is the folder part for the slip given. Here "6" refers to "Mathematical analysis", "6.1" refers to "Real analysis", and "6.1.2" refers to sequences of real numbers. Observe, the folder part moves from more general ("Real analysis") to the more specific; this is characteristic of all "folders" in my Zettelkasten.
The "file part" encodes the placement of a slip "inside" a "folder". The idea is that I'm sending "telegrams" to an intelligent (but completely ignorant) colleague. My colleague has never heard of real analysis (or anything else besides arithmetic and spelling). I need to order my telegrams somehow. The first attempt is to use Threads, just a sequence of numbers.
But when I want to discuss further an aspect of a thread (like, I want to pause and give a "sub-thread" consisting of examples), then I need to Branch off a slip to talk about some specific aspect. A single slip may have zero or more branches. I indicate a branch by writing a letter. Usually "a" is reserved for examples (unless there is a critical remark necessary to clarify something), then "b" is reserved for theorems about a concept.
For the example given, there is some fibbing here. That is to say, the ID number should really be "6.1.2/3b1". Why? Because letters act like different "flavors" of decimal separations. There shouldn't be any privilege to them (e.g., "a" is not more important than "b", there is no sense of priority, etc.). I haven't added any further theorems concerning "6.1.2/3", so I lazily truncated the ID number of the example to "6.1.2/3b".
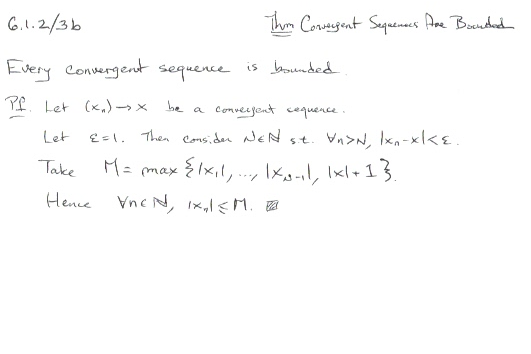
Title. The title is usually of the form:
⟨title⟩ ::= ⟨register⟩ ". " ⟨summary⟩
As a mathematician, I habitually write "definition", "theorem", "proof", "remark", "example", etc., in an abbreviated form ["defn", "thm", "pf", "rmk", "ex", respectively]. Then I write a human readable summary of the result, like "Convergent sequences are bounded".
I previously mentioned introducing a "code" register when writing literate programs, and discussed the content of such notes.
Recently, I have also been experimenting with writing notes on history, and I have found registers of little use there. So your mileage may vary.
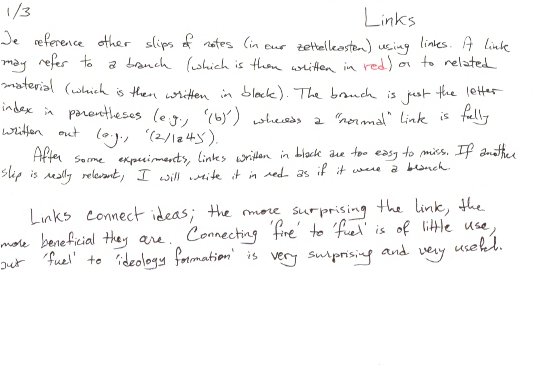
Figure 4. Another example of a permanent note [front side]. NOTE: all links are written in red ink (using non-red ink was a bad idea).
Also worth mentioning, the first "folder" is about my Zettelkasten's conventions. An example slip from this "folder" is given in Figure 4.
Content of a permanent note. This is pretty subjective, and varies considerably. For mathematics, I have a great luxury here since every "register" is a separate slip.
I have found it useful for propositions [lemmas, theorems, corollaries, etc.] to give a "proof sketch" below the theorem statement. If there is some justification for a step, it's a branch off the slip.
Examples are just special kinds of propositions, and the emphasis of its content is the proof.
I can give some concrete "tricks" to writing permanent notes, they both boil down to relating new material to existing content already in the Zettelkasten.
Example: Creating examples. A useful exercise is to go back to examples existing in my Zettelkasten, and try to use it as an example of the new material. For instance, I have the "symmetries of the tetrahedron" as an example of a group. When reading figure 1, I may pose the question: can we express the symmetries of the tetrahedron as a universal arrow? (Not in any obvious way, but there are other gadgets which may be a universal arrow, so I keep looking.) When I find an example [call it a "widget"], I create a new permanent note entitled "Ex: widget (Universal Arrow)", the first sentence is "A widget [link] is a universal arrow." The "[link]" refers back to the original slip which first discussed the "widget".
Usually this process is more "subconscious" than actually flipping through every slip in my Zettelkasten. With the universal arrow example, I usually know an example would be an algebraic gadget, so I can restrict my focus to the "Abstract algebra" folder; even then, I can restrict attention to a few "subfolders".
Example: Translating content. Another way to approach creating permanent notes is to "translate" old material from a different domain to whatever I just read. For example, I learned the Krull-Schmidt theorem for rings and modules. But currently I am studying finite group theory. Could I frame an analogous theorem for groups?
Convention: formal proof sketches. I try to write the mathematical proofs using Wiedijk's Mathematical Vernacular, which is a synthesis of formal proof steps while leaving the terms and formulas informal. I also write "big step proofs", or what Wiedijk calls formal proof sketches.
Back of permanent notes. On the back side of a permanent note is a list of references which were used for the slip. They are lists to where one could find the same result in the literature which I've read, and refer to entries in my "bibliography apparatus".
Integration into the Zettelkasten. Usually, I study a book or article, write a number of permanent notes without any ID number. Only after I have extracted all the information needed from my source, I begin to think about how to integrate the new permanent notes into my Zettelkasten.
Sometimes the order of material in a book is "backwards" (it happens a lot in physics), so the corresponding permanent notes are in reverse order. Less frequently, the material needs to be partitioned to separate parts of the Zettelkasten. There has not been a time when the material is "completely disconnected" from each other, in the sense that they are added to different threads.
Gorenstein, Lyons, and Solomon (and friends) have been writing a consolidated proof for the classification theorem for finite simple groups...since 1994. In fact, it's still a work in progress. How big will it be?
At present, there is an expected additional 4 volumes coming (according to David Roberts's answer on Mathoverflow). Performing a linear regression on the number of pages in terms of the volume number, we can make a prediction. Here's the R code doing this:
This gives us a better fit (adjusted R-squared of 0.908) with a better error estimate (with 95% probability, it will be 6080 pages give or take 40 pages).
Tl;dr2: the classification of finite simple groups can be expected to be around 6080±40 pages long.
I've been re-reading John Harrison's Handbook of Practical Logic and Automated Reasoning (a wonderful book), with an eye towards writing notes for my Zettelkasten.
What I have done, out of habit, is I've reworked the code in Standard ML (as opposed to OCaml). I've added a "register" (mathematicians would recognize them as "theorem environments" in LaTeX) for source code, and the template for writing such notes on a 5.5 inch by 4.25 inch (A6) slip of paper looks like:
[id number]
Code [name of chunk]
[English summary of the code, or the algorithm, or...]
⟨[name of chunk]⟩≡
[Standard ML code here]
Just replace the bracketed italicized text (including the brackets) with your own text. I do write a horizontal line separating the "code block" from the "text block", and underline the "Code" part of the title.
I follow the general heuristics Knuth suggests for literate programming, even using the names of code chunks in angled braces as if they were statements. Following some of the early handwritten documents on Standard ML, I underline keywords like "if", "then", "else", "case", "fun", etc., in the code block.
While reading Harrison's book, I add unit tests, write up examples, etc. This isn't done "in the abstract", I actually type the code up on a computer (e.g., here is my implementation of most of the propositional logic code).
One advantage to this is that we can prove properties about the code snippet in branches off the code zettel. Another advantage, giving a good human-level summary of the code snippet helps greatly with Harrison's book, since the techniques from chapter 3 make another appearance in chapter 6 (i.e., 300 pages later) and I forget some of the nuances surrounding the implementation ("Is skolem called before or after nnf?"), I can just glance at the snippets for guidance.
Another useful aspect of using a Zettelkasten for studying theorem provers is that it facilitates blending notes from multiple books seamlessly. I noticed this accidentally, when I was unsatisfied with Harrison's description of Herbrand universes, then started reading Chang and Lee's Symbolic Logic and Mechanical Theorem Proving (1973) description of Herbrand universes.
There are other aspects of Zettelkasten which seems uniquely suitable for studying theorem provers, but I digress.
I'm experimenting with using a Zettelkasten for literate programming "by hand" more generally, which is a bizarre but fascinating experience, especially when exploring monads in Standard ML.
Anyways, I just wanted to make note of this quirky note-taking system for literate programming.